
필자의 동의를 받아 번역, 포스팅 합니다.

medium.com
미국에서만 한 해에 약 33000명이 교통사고로 사망한다. 따라서 무인 자동차가 교통사고율을 낮출 수 있는 가능성에 집중 할 수 밖에 없다. 누구나 버튼 하나만 누르면 A에서 B로 갈 수 있는 무인 자동차를 개발함에 있어, 우리도 무인 자동차가 도로 안전에 미치는 영향과 기술 발달을 측정하는 방법을 생각하고 있다.
구글의 무인 자동차의 안전성을 판단하기 위해 이해할 가장 중요한 것 중에 하나는, 교외에서의 단순 접촉사고다. 이런 단순 접촉사고들을 포함해 많은 사고들이 공식 통계에 포함되지 않기에, 길에서 얼마나 자주 다른 차들과 접촉할지 예상할 수밖에 없다. 아무리 우리가 개발한 소프트웨어와 센서들이 사람보다 빠르게 위험상황을 감지하고 그 상황을 회피할 수 있다고 해도, 속도와 거리라는 물리 법칙까지 거스를 수는 없는 법. 어쩔땐 신호대기중에 치이기도 한다. 무인 자동차라고 모든 사고를 예방할 수는 없기 때문에, 무인 자동차가 도로를 돌아다닐 미래의 사회에 있어서 이건 중요하다.
평범한 일상중에 일어날 수 있는 교통사고중에 가장 대표적인게 단순 접촉사고인데, 피해도 거의 없고 사람도 다치지 않는 이런 사고는 경찰에 신고도 하지 않기 때문에 파악하기가 가장 어렵다. 미국도로교통안전국 (NHTSA)의 자료에 의하면 이런 경미한 접촉사고가 전체 사고의 55퍼센트에 달한다고 한다. 매일같이 계속해서 운전을 하지 않고서 이런 소소한 사고까지 알기는 매우 힘든데, 그래서 우리는 직접 20대가 넘는 무인 자동차로 170만 마일 (=270만 km)가 넘는 거리를 주행해봤다. (자동과 수동 운전 포함해서) 무인 자동차들은 무인 모드로 100만 마일 (=160만 km)에 가까운 거리를 주행했고, 지금도 한주에 10000 마일 (=16000 km) 정도를 시내에서 무인 모드로 운행중이다.
모두가 더 안전한 운전자가 되길 바라는 마음에서, 우리가 봐왔던 것들을 조금 써보려고 한다. 놀라운 것은 별로 없는데, 특히 94%의 사고가 운전자 실책이라는 것을 이미 알면 더 그렇다.
많은 시간 운전하다보면, 사고라는건 무인 자동차든, 유인 자동차든 상관하지 않고 일어난다. 6년이 넘는 시간동안 프로젝트를 진행하면서 11번의 접촉사고를 겪었는데 그 중에 무인 자동차의 잘못으로 사고가 일어난 적은 한번도 없었다.
후방 접촉사고가 미국에선 가장 많이 일어나는데, 그런 상황에서 앞차로써 할 수 있는 일은 별로 없다. 우리도 후방 접촉사고를 7번 당했는데, 보통은 신호대기중에 그랬지만 고속도로에서 그런 적도 있다. 차 옆이 긁힌 적도 두어번 있었고, 정지 표지판을 무시한 차에게 받힌 적도 있었다. 예상할 수 있듯이 시내에서 사고가 더 빈번하게 일어났는데, 시내주행 거리가 더 적었음에도 8번의 사고가 있었다. 그런 경험들이 프로젝트에 큰 도움을 주기도 했고. 우린 사고가 일어났을때 그게 우리 잘못이든 아니든 자세하게 리뷰해보는 절차를 가지고 있다.
교외의 시덥잖은 접촉사고에 대한 이해도 늘어나고 있지만, 정말 위험한 사고는 칼치기나 신호 무시에서 나온다는 것도 알게 됐다. 그런 패턴은 통계 자료에서는 찾기 힘들지만, 주변 사람들을 위험한 상황에 빠트리는 행위다.
**많은 사람들은 운전에 집중하지 않는다. **미국에서 시간에 상관없이 항상 66만명의 사람들이 운전중에 딴짓을 한다. 우리 안전 요원들은 차선을 왔다갔다 하는 운전자들을 많이 봤는데, 그런 사람들은 운전중에 책을 읽고 있거나 심지어 트럼펫을 불고 있기도 했다. 무인 자동차는 그런 부분에선 사람을 넘어서는데, 360도를 100% 집중해서 모든 상황에 언제나 깨어있고, 우리의 최신 센서는 축구장 두개 범위 안에 다른 차들, 자전거들, 행인들을 감지할 수 있다.
교차로는 위험한 곳이다. 지난 몇년간, 21%의 교통사고 사망과 50%의 중상이 교차로에서 일어났다. 그리고 그런 사고들은 차가 행인을 치는 사고였지, 신호를 무시하는 차와 정상 진행중인 차의 사고가 아니었다. 그래서 구글의 무인 자동차는 초록불이 켜져도 잠깐동안 멈춰있다가 간다. 성급하거나 다른 곳에 정신이 팔려있는 사람들이 안전할 수 있게.
medium.com
위 사진에서 자전거 운전자 (푸른 박스)는 교차로를 늦게 횡단하다 좌회전 신호를 받은 차에 치일 뻔 한다. (푸른 박스 바로 밑에 보라색 박스) 좌회선 차량 운전자는 신호만 봤지 자전거를 보지 못했고 사고로 이어질 뻔 했다. 무인 자동차는 자전거의 경로를 예측해서 (빨간색 줄) 자전거가 교차로에서 빠져나갈때까지 기다렸다.
진입로도 문제가 될 수 있다. 우린 잘못 진입하여 역주행을 하는 차들을 많이 봤다. 특히나 밤에 더 그런데, 사람들이 도로 중앙분리대를 보지 못하고 잘못 진입한 경우다.

medium.com
위 사진을 보면 한대도 아닌 두대의 차가 (무인 자동차가 가는 길의 1차선에 있는 두개의 보라색 박스) 역주행을 하고 있는 것을 볼 수 있다. 이건 캘리포니아 마운틴뷰의 가장 통행이 많은 길에서 일어난 일이다.
운전자들이 차선을 잘못 잡았다는 것을 깨달았을때 멍청한 짓을 하기도 한다.

출처: medium.com
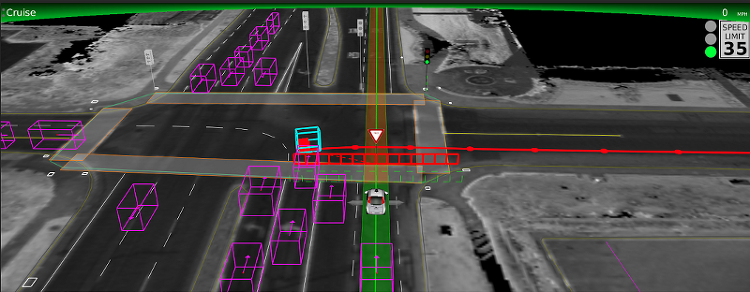
위 사진에서 차 한대가 (무인 자동차 전방에 있는 보라색 삼각형, 잘 보면 느낌표가 떠있다.) 우회전 차선이 아닌데도 불법 우회전을 하고 있다. 무인 자동차 전방의 초록색 박스들은 우리가 “울타리”라고 부르는 것인데, 이 울타리를 다른 차가 침범하면 무인 자동차는 안전을 위해 감속하게 된다.
어쩔때는, 사람들은 그냥 다른 차를 무시하고 운전하기도 한다. 아래 사진에서 차 한대가 (무인 자동차 왼편에 있는 보라색 박스) 좌회전 후 1차선으로 진입해야 함에도 우리 차를 무시하고 넓게 돌고 있다. 위에서 설명했던 울타리가 빨간색으로 변했는데, 이럴때 무인 자동차는 다른 차를 피하기 위해 멈추게 된다.

medium.com
이런 경험들이 (다른 수많은 경험들도) 축적되며 무인 자동차가 지금의 도로에 적응할 수 있도록 했다. 우린 계속해서 주행하며 이런 상황들을 겪을 것이고, 무인 자동차가 이런 미친 상황들에게서 우릴 해방시켜줄때까지 개발을 계속할 것이다.